周四去测蚌的一些准备事宜
前言
测蚌:相机正对河蚌,测得掩码,查掩码像素点个数,因为相机与河蚌距离认为是固定的,所以掩码像素点个数可体现河蚌的相对大小。每个河蚌可以根据水池,货架,相机id等获取一个具体到河蚌的id。将日期,河蚌id,像素点个数等信息存储到数据库,并要给用户查看的接口(需协商)。通讯协议(控制台给插相机的树莓派什么信号开始工作)。每个相机通过usb扩展器或者usb直连usb相机。
VNC服务(方便查看树莓派)
先用自带的虚拟键盘安装一个虚拟键盘。
sudo apt install matchbox-keyboard
插上屏幕,查看ip,电脑和树莓派在同一个子网。
sudo raspi-config
按照这篇文章来配置。
摄像头usb口设置
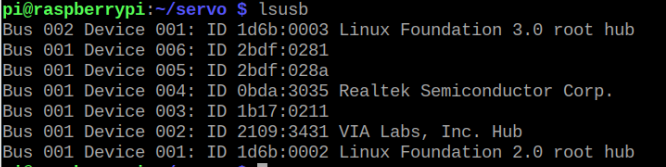
需要知道每个相机的id,可以进行usb映射。
lsusb
固定usb映射:
sudo vi /etc/udev/rules.d/camera.rules
如果一个摄像头插一个相机:
我个人的命名规则:lt: left top, rb: right bottom
KERNEL=="video*",KERNELS=="1-1.3:1.0", MODE:="0777",ATTR{index}=="0", SYMLINK+="lt_camera"
KERNEL=="video*", KERNELS=="1-1.2:1.0" , MODE:="0777", ATTR{index}=="0", SYMLINK+="rb_camera"
KERNEL=="video*", KERNELS=="1-1.1:1.0", MODE:="0777", ATTR{index}=="0",SYMLINK+="rt_camera"
KERNEL=="video*", KERNELS=="1-1.4:1.0", MODE:="0777",ATTR{index}=="0", SYMLINK+="lb_camera"
如果要连接usb扩展器,如一个usb接4个,首先,应该需要扩展器外接电源。
rules更改为:
KERNEL=="video*",KERNELS=="1-1.3.1:1.0", MODE:="0777",ATTR{index}=="0", SYMLINK+="lt_camera_1"
KERNEL=="video*",KERNELS=="1-1.3.2:1.0", MODE:="0777",ATTR{index}=="0", SYMLINK+="lt_camera_2"
KERNEL=="video*",KERNELS=="1-1.3.3:1.0", MODE:="0777",ATTR{index}=="0", SYMLINK+="lt_camera_3"
KERNEL=="video*",KERNELS=="1-1.3.4:1.0", MODE:="0777",ATTR{index}=="0", SYMLINK+="lt_camera_4"
KERNEL=="video*", KERNELS=="1-1.2.1:1.0" , MODE:="0777", ATTR{index}=="0", SYMLINK+="rb_camera_1"
KERNEL=="video*", KERNELS=="1-1.2.2:1.0" , MODE:="0777", ATTR{index}=="0", SYMLINK+="rb_camera_2"
KERNEL=="video*", KERNELS=="1-1.2.3:1.0" , MODE:="0777", ATTR{index}=="0", SYMLINK+="rb_camera_3"
KERNEL=="video*", KERNELS=="1-1.2.4:1.0" , MODE:="0777", ATTR{index}=="0", SYMLINK+="rb_camera_4"
KERNEL=="video*", KERNELS=="1-1.1.1:1.0", MODE:="0777", ATTR{index}=="0",SYMLINK+="rt_camera_1"
KERNEL=="video*", KERNELS=="1-1.1.2:1.0", MODE:="0777", ATTR{index}=="0",SYMLINK+="rt_camera_2"
KERNEL=="video*", KERNELS=="1-1.1.3:1.0", MODE:="0777", ATTR{index}=="0",SYMLINK+="rt_camera_3"
KERNEL=="video*", KERNELS=="1-1.1.4:1.0", MODE:="0777", ATTR{index}=="0",SYMLINK+="rt_camera_4"
KERNEL=="video*", KERNELS=="1-1.4.1:1.0", MODE:="0777",ATTR{index}=="0", SYMLINK+="lb_camera_1"
KERNEL=="video*", KERNELS=="1-1.4.2:1.0", MODE:="0777",ATTR{index}=="0", SYMLINK+="lb_camera_2"
KERNEL=="video*", KERNELS=="1-1.4.3:1.0", MODE:="0777",ATTR{index}=="0", SYMLINK+="lb_camera_3"
KERNEL=="video*", KERNELS=="1-1.4.4:1.0", MODE:="0777",ATTR{index}=="0", SYMLINK+="lb_camera_4"
然后重启服务:
sudo /etc/init.d/udev restart
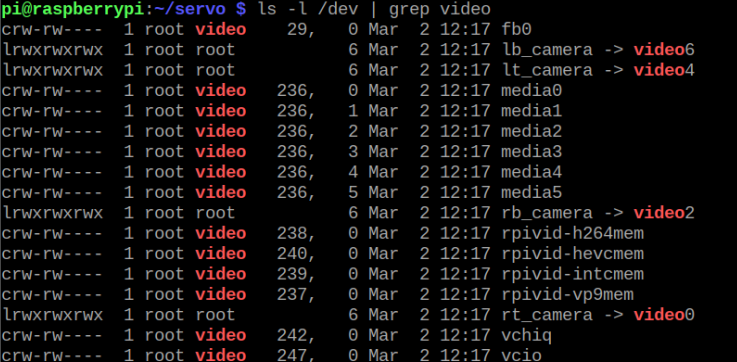
然后就可以发现video*无论怎么变,端口都有一个自己的名字。
原来插4个摄像头上传图片
仅供参考。
改成了多线程版本,应是可用的。
暂时先用我自己的服务器。lighttpd已经开启了,可以通过诸如此类的静态服务器供客户查看图片
http://42.193.121.128:12345/查看图片,server.py只是把文件放入到这个文件夹。
import socket
import time
import cv2
import os
import numpy
import pymysql
import random
bangcount_test1 = 1000
bangcount_test2 = 1024
bangcount_test3 = 1010
bangcount_test4 = 1200
def ReceiveImg(s):
global bangcount_test1,bangcount_test2,bangcount_test3,bangcount_test4
def recvall(sock, count):
buf = b''#buf是一个byte类型
while count:
#接受TCP套接字的数据。数据以字符串形式返回,count指定要接收的最大数据量.
newbuf = sock.recv(count)
if not newbuf: return None
buf += newbuf
count -= len(newbuf)
return buf
# 打开数据库连接
db = pymysql.connect(host='localhost',
user='root',
password='xxx',
database='bang')
cursor = db.cursor()
#接受TCP连接并返回(conn,address),其中conn是新的套接字对象,可以用来接收和发送数据。addr是连接客户端的地址。
#没有连接则等待有连接
conn, addr = s.accept()
print('connect from:'+str(addr))
pure_date = time.strftime("%Y%m%d",time.localtime())
curDate = "/var/www/camera/"+pure_date
if not os.path.exists(curDate):
os.makedirs(curDate)
curDate = curDate+'/'
start = time.time()#用于计算接收图片总时间
# 接收lt图像
length = recvall(conn,16)#获得图片文件的长度,16代表获取长度
imgMsg = bytes.decode(recvall(conn,16).strip())#获取图片信息
stringData = recvall(conn, int(length))#根据获得的文件长度,获取图片文件
data = numpy.frombuffer(stringData, numpy.uint8)#将获取到的字符流数据转换成1维数组
decimg=cv2.imdecode(data,cv2.IMREAD_COLOR)#将数组解码成图像
cv2.imwrite(curDate+imgMsg+"_lt.jpg",decimg)#保存图像
bangcount_test1+=random.randint(10,20)
sql_1 = "INSERT INTO pixel_dot_count(str_date,bang_id,count) VALUES ('%s','%s',%s)"%\
(pure_date,imgMsg+'_lt',bangcount_test1)
# 接收lb图像
length = recvall(conn,16)#获得图片文件的长度,16代表获取长度
imgMsg = bytes.decode(recvall(conn,16).strip())#获取图片信息
stringData = recvall(conn, int(length))#根据获得的文件长度,获取图片文件
data = numpy.frombuffer(stringData, numpy.uint8)#将获取到的字符流数据转换成1维数组
decimg=cv2.imdecode(data,cv2.IMREAD_COLOR)#将数组解码成图像
cv2.imwrite(curDate+imgMsg+"_lb.jpg",decimg)#保存图像
bangcount_test2+=random.randint(10,20)
sql_2 = "INSERT INTO pixel_dot_count(str_date,bang_id,count) VALUES ('%s','%s',%s)"%\
(pure_date,imgMsg+'_lb',bangcount_test2)
# 接收lt图像
length = recvall(conn,16)#获得图片文件的长度,16代表获取长度
imgMsg = bytes.decode(recvall(conn,16).strip())#获取图片信息
stringData = recvall(conn, int(length))#根据获得的文件长度,获取图片文件
data = numpy.frombuffer(stringData, numpy.uint8)#将获取到的字符流数据转换成1维数组
decimg=cv2.imdecode(data,cv2.IMREAD_COLOR)#将数组解码成图像
cv2.imwrite(curDate+imgMsg+"_rt.jpg",decimg)#保存图像
bangcount_test3+=random.randint(10,20)
sql_3 = "INSERT INTO pixel_dot_count(str_date,bang_id,count) VALUES ('%s','%s',%s)"%\
(pure_date,imgMsg+'_rt',bangcount_test3)
# 接收lt图像
length = recvall(conn,16)#获得图片文件的长度,16代表获取长度
imgMsg = bytes.decode(recvall(conn,16).strip())#获取图片信息
stringData = recvall(conn, int(length))#根据获得的文件长度,获取图片文件
data = numpy.frombuffer(stringData, numpy.uint8)#将获取到的字符流数据转换成1维数组
decimg=cv2.imdecode(data,cv2.IMREAD_COLOR)#将数组解码成图像
cv2.imwrite(curDate+imgMsg+"_rb.jpg",decimg)#保存图像
bangcount_test4+=random.randint(10,20)
sql_4 = "INSERT INTO pixel_dot_count(str_date,bang_id,count) VALUES ('%s','%s',%s)"%\
(pure_date,imgMsg+'_rb',bangcount_test4)
try:
cursor.execute(sql_1)
cursor.execute(sql_2)
cursor.execute(sql_3)
cursor.execute(sql_4)
db.commit()
except:
db.rollback()
db.close()
end = time.time()
print("4张图片耗时 ",end-start," s");
if __name__ == '__main__':
#IP地址'0.0.0.0'为等待客户端连接
address = ('0.0.0.0', 10086)
s = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
s.bind(address)
#开始监听TCP传入连接。参数指定在拒绝连接之前,操作系统可以挂起的最大连接数量。该值至少为1,大部分应用程序设为5就可以了。
s.listen(1)
while 1:
ReceiveImg(s)
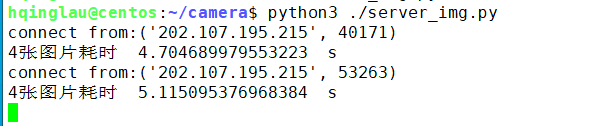
服务器文件夹位于hqinglau的~/camera文件夹下,server_img.py关闭了数据库,只是上传图片。
# encoding:utf-8
import socket
import threading
import time
import cv2
import os
import numpy
import pymysql
import random
def ReceiveImg(conn,addr):
def recvall(sock, count):
buf = b''#buf是一个byte类型
while count:
#接受TCP套接字的数据。数据以字符串形式返回,count指定要接收的最大数据量.
newbuf = sock.recv(count)
if not newbuf: return None
buf += newbuf
count -= len(newbuf)
return buf
#接受TCP连接并返回(conn,address),其中conn是新的套接字对象,可以用来接收和发送数据。addr是连接客户端的地址。
print('connect from:'+str(addr))
pure_date = time.strftime("%Y%m%d",time.localtime())
curDate = "/var/www/camera/"+pure_date
if not os.path.exists(curDate):
os.makedirs(curDate)
curDate = curDate+'/'
start = time.time()#用于计算接收图片总时间
# 接收lt图像
length = recvall(conn,16)#获得图片文件的长度,16代表获取长度
# 16代表图片的名字
imgMsg = bytes.decode(recvall(conn,16).strip())#获取图片信息
stringData = recvall(conn, int(length))#根据获得的文件长度,获取图片文件
data = numpy.frombuffer(stringData, numpy.uint8)#将获取到的字符流数据转换成1维数组
decimg=cv2.imdecode(data,cv2.IMREAD_COLOR)#将数组解码成图像
cv2.imwrite(curDate+imgMsg+"_lt.jpg",decimg)#保存图像
# 接收lb图像
length = recvall(conn,16)#获得图片文件的长度,16代表获取长度
imgMsg = bytes.decode(recvall(conn,16).strip())#获取图片信息
stringData = recvall(conn, int(length))#根据获得的文件长度,获取图片文件
data = numpy.frombuffer(stringData, numpy.uint8)#将获取到的字符流数据转换成1维数组
decimg=cv2.imdecode(data,cv2.IMREAD_COLOR)#将数组解码成图像
cv2.imwrite(curDate+imgMsg+"_lb.jpg",decimg)#保存图像
# 接收lt图像
length = recvall(conn,16)#获得图片文件的长度,16代表获取长度
imgMsg = bytes.decode(recvall(conn,16).strip())#获取图片信息
stringData = recvall(conn, int(length))#根据获得的文件长度,获取图片文件
data = numpy.frombuffer(stringData, numpy.uint8)#将获取到的字符流数据转换成1维数组
decimg=cv2.imdecode(data,cv2.IMREAD_COLOR)#将数组解码成图像
cv2.imwrite(curDate+imgMsg+"_rt.jpg",decimg)#保存图像
# 接收lt图像
length = recvall(conn,16)#获得图片文件的长度,16代表获取长度
imgMsg = bytes.decode(recvall(conn,16).strip())#获取图片信息
stringData = recvall(conn, int(length))#根据获得的文件长度,获取图片文件
data = numpy.frombuffer(stringData, numpy.uint8)#将获取到的字符流数据转换成1维数组
decimg=cv2.imdecode(data,cv2.IMREAD_COLOR)#将数组解码成图像
cv2.imwrite(curDate+imgMsg+"_rb.jpg",decimg)#保存图像
end = time.time()
print("4张图片耗时 ",end-start," s");
class UploadThread(threading.Thread):
def __init__(self,client,path):
threading.Thread.__init__(self)
self.client = client
self.path = path
def run(self):
ReceiveImg(self.client,self.path)
if __name__ == '__main__':
#IP地址'0.0.0.0'为等待客户端连接
address = ('0.0.0.0', 10086)
s = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
s.bind(address)
#开始监听TCP传入连接。参数指定在拒绝连接之前,操作系统可以挂起的最大连接数量。该值至少为1,大部分应用程序设为5就可以了。
s.listen(32)
while 1:
clientSocket,clientAddr = s.accept()
# 开启线程
ut = UploadThread(clientSocket,clientAddr)
ut.start()
服务端:
客户端:

可能要安装python3。
sudo apt install python3
client.py
#-*-coding:utf-8-*-
import socket
import cv2
import numpy
import sys
import time
# 图片信息,如指定编号
def SendImg(imgMsg):
#建立sock连接
#address要连接的服务器IP地址和端口号
address = ('42.193.121.128', 10086)
try:
#socket.AF_INET:服务器之间网络通信
#socket.SOCK_STREAM:流式socket , for TCP
sock = socket.socket(socket.AF_INET,socket.SOCK_STREAM)
#开启连接
sock.connect(address)
except socket.error as msg:
print(msg)
sys.exit(1)
#建立图像读取对象
capture = cv2.VideoCapture("/dev/lt_camera")
ret,frame_lt = capture.read()
capture.release()
capture = cv2.VideoCapture("/dev/lb_camera")
ret,frame_lb = capture.read()
capture.release()
capture = cv2.VideoCapture("/dev/rt_camera")
ret,frame_rt = capture.read()
capture.release()
capture = cv2.VideoCapture("/dev/rb_camera")
ret,frame_rb = capture.read()
capture.release()
encode_param=[int(cv2.IMWRITE_JPEG_QUALITY),50]
for frame in [frame_lt,frame_lb,frame_rt,frame_rb]:
#停止0.1S 防止发送过快服务的处理不过来,如果服务端的处理很多,那么应该加大这个值
time.sleep(0.1)
#cv2.imencode将图片格式转换(编码)成流数据,赋值到内存缓存中;主要用于图像数据格式的压缩,方便网络传输
#'.jpg'表示将图片按照jpg格式编码。
result, imgencode = cv2.imencode('.jpg', frame, encode_param)
#建立矩阵
data = numpy.array(imgencode)
#将numpy矩阵转换成字符形式,以便在网络中传输
stringData = data.tostring()
#先发送要发送的数据的长度
#ljust() 方法返回一个原字符串左对齐,并使用空格填充至指定长度的新字符串
sock.send(str.encode(str(len(stringData)).ljust(16)));
#图片信息如图片名
sock.send(str.encode(imgMsg).ljust(16));
#发送数据
sock.send(stringData);
sock.close()
if __name__ == '__main__':
SendImg("1234567")
数据库
例如存放日期(应更细致一些,方面具体查找),蚌的id,掩码测得的点云数。
mysql> show tables;
+-----------------+
| Tables_in_bang |
+-----------------+
| pixel_dot_count |
+-----------------+
1 row in set (0.00 sec)
mysql> desc pixel_dot_count;
+----------+----------+------+-----+---------+----------------+
| Field | Type | Null | Key | Default | Extra |
+----------+----------+------+-----+---------+----------------+
| id | bigint | NO | PRI | NULL | auto_increment |
| str_date | char(16) | NO | MUL | NULL | |
| bang_id | char(10) | NO | MUL | NULL | |
| count | int | NO | | NULL | |
+----------+----------+------+-----+---------+----------------+